

Vous trouvez ici, une description et des photos du travail mené par des élèves de première-
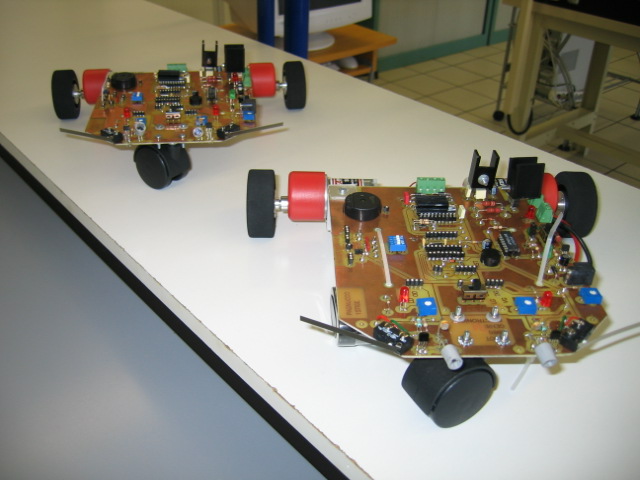
Les élèves ont étudié et réalisé un Robot capable d'évoluer de manière autonome - Un premier protoype a été utilisé pour découvrir les fonctions électroniques nécessaires à son déplacement.Cette version présentait quelques améliorations possibles que les élèves ont intégré dans cette Version2:
- Changement des moto-réducteurs pour un modèle moins gourmand, moins bruyant et plus fiable
- Améliorations des roues pour un meilleur couplage mécanique et une meilleure adhérence
- Suppression du systèmes multi-cartes inter-connectées pour un seul circuit imprimé faisant office de chassis
- Changement du micro-contrôleur pour un PIC 16F819, moins coûteux et disposant de l'environement MPLAB de programmation
Une première programmation a été faite avec succès pour vérifier les différents mouvements du RobotV2.Le robot avance, recule tourne à gauche comme à droite avec une vitesse et une qualité de déplacement satisfaisantes.
Dans un second temps le programme a été complété de manière à gérer les détecteurs d'obstacles.Le Robot a la capacité d'éviter ceux-ci.Il reste donc à valider d'autres programmes qui tiendront compte d'autres paramètres (suivre un faisceau lumineux grâce aux L.D.R, etc...) voire même de la télécommande HF qui est prévue.